-
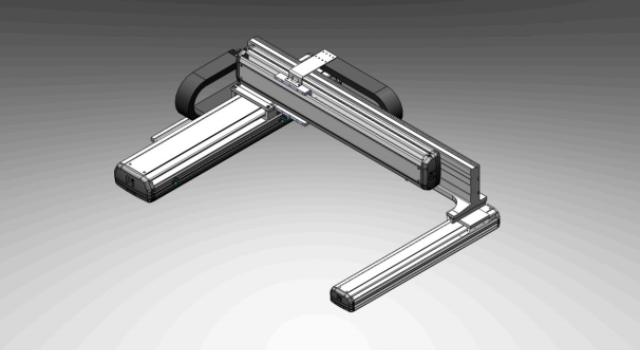
 云南自动化直交机械手模具厂家
云南自动化直交机械手模具厂家直交机械手的工作原理基于电机驱动和机械传动。常见的驱动方式有伺服电机、步进电机等,它们通过皮带、丝杠、齿轮等传动机构将旋转运动转化为直线运动。以丝杠传动为例,电机带动丝杠旋转,与丝杠配合的螺母则沿着丝杠轴线方向做直线移动,进而带动安装在螺母上的机械手部件运动。在这个过程中,控制系统会根据预设的程序和指令,精确控制电机的转速、转向和运行时间,从而实现机械手在X、Y、Z轴方向上的精确位移和定位。同时,传感器实时监测机械手的位置和运动状态,并将信息反馈给控制系统,以便及时调整控制参数,保证机械手的运动精度和稳定性。这种闭环控制的工作方式使得直交机械手能够适应复杂的工作任务和高精度的操作要求。 由...
-
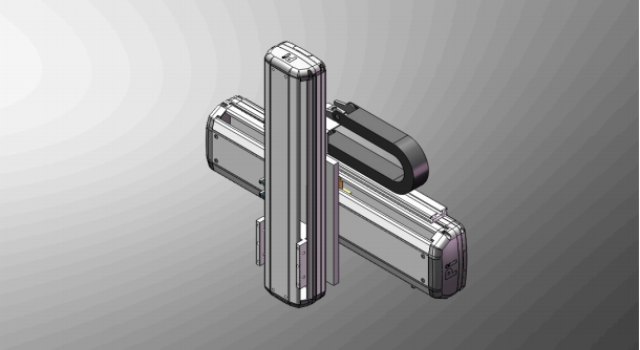
 山东内嵌式直交机械手模组
山东内嵌式直交机械手模组直交机械手在医疗行业的应用挑战与解决方案:医疗行业对设备的精度、可靠性以及安全性要求极高,直交机械手在该领域的应用面临诸多挑战。首先,医疗环境对设备的洁净度要求苛刻,直交机械手需要具备良好的防尘、防细菌设计,以防止细菌滋生与传播。为此,可采用特殊的表面处理工艺,使机械手表面光滑且不易吸附灰尘与细菌,同时在结构设计上减少易积尘的缝隙与角落。其次,医疗操作往往涉及高精度的动作,如微创手术中的器械操作,这对机械手的定位精度与运动稳定性提出了极高要求。通过采用更高精度的传感器、优化控制算法以及提升机械结构的刚性等措施,能够有效提高机械手的精度与稳定性。此外,医疗设备的安全性至关重要,直交机械手需要...
-
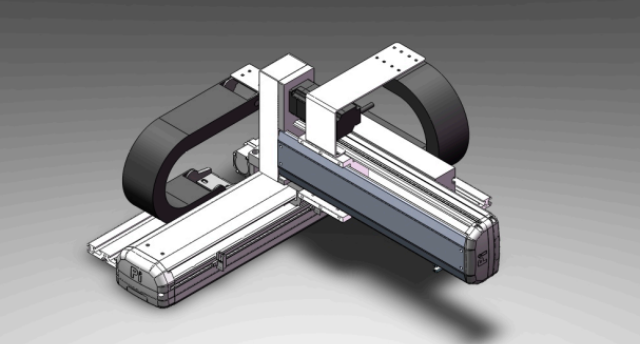
 河北极座标型中负载直交机械手多少钱
河北极座标型中负载直交机械手多少钱直交机械手的工作原理基于电机驱动和机械传动。常见的驱动方式有伺服电机、步进电机等,它们通过皮带、丝杠、齿轮等传动机构将旋转运动转化为直线运动。以丝杠传动为例,电机带动丝杠旋转,与丝杠配合的螺母则沿着丝杠轴线方向做直线移动,进而带动安装在螺母上的机械手部件运动。在这个过程中,控制系统会根据预设的程序和指令,精确控制电机的转速、转向和运行时间,从而实现机械手在X、Y、Z轴方向上的精确位移和定位。同时,传感器实时监测机械手的位置和运动状态,并将信息反馈给控制系统,以便及时调整控制参数,保证机械手的运动精度和稳定性。这种闭环控制的工作方式使得直交机械手能够适应复杂的工作任务和高精度的操作要求。 滚...
-
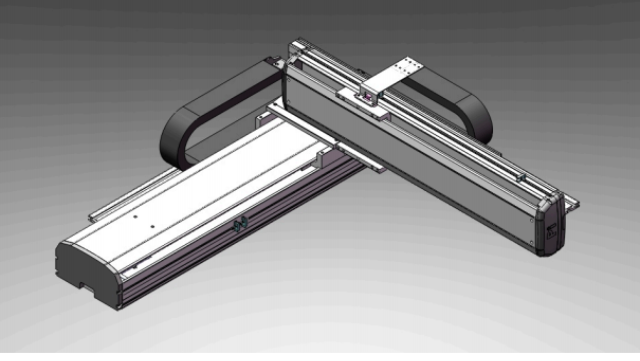
 宁夏螺杆型直交机械手厂家
宁夏螺杆型直交机械手厂家直交机械手的机械结构剖析:直交机械手的机械结构犹如其坚实的骨架,支撑着各项功能的实现。其主体框架通常选用**度的铝合金或钢材打造,确保在运行过程中具备***的刚性与稳定性,有效抵御振动与变形。传动部分常见的有滚珠丝杠和同步带两种形式。滚珠丝杠凭借高精度、高负载能力的特性,适用于对定位精度要求严苛的作业场景;同步带则以其高速、低噪音的优势,在追求高效运行的场合大显身手。导轨系统如同机械手的“轨道”,保障运动部件平稳顺滑地移动,减少摩擦与磨损,延长设备使用寿命。而滑块、连接件等部件则各司其职,紧密协作,共同构建起直交机械手精密且可靠的机械结构体系。 堆码任务中,直交机械手有序堆码,整齐...
-
 辽宁悬臂型中负载直交机械手价格
辽宁悬臂型中负载直交机械手价格直交机械手的工作原理基于电机驱动和机械传动。常见的驱动方式有伺服电机、步进电机等,它们通过皮带、丝杠、齿轮等传动机构将旋转运动转化为直线运动。以丝杠传动为例,电机带动丝杠旋转,与丝杠配合的螺母则沿着丝杠轴线方向做直线移动,进而带动安装在螺母上的机械手部件运动。在这个过程中,控制系统会根据预设的程序和指令,精确控制电机的转速、转向和运行时间,从而实现机械手在X、Y、Z轴方向上的精确位移和定位。同时,传感器实时监测机械手的位置和运动状态,并将信息反馈给控制系统,以便及时调整控制参数,保证机械手的运动精度和稳定性。这种闭环控制的工作方式使得直交机械手能够适应复杂的工作任务和高精度的操作要求。 常...