-
 湖北ROS位算单元系统
湖北ROS位算单元系统智能园区综合能源系统,位算单元通过精确位操作实现了三大关键突破。实时性:纳秒级逻辑判断满足消防联动、电梯调度等硬实时需求;能效比:替代复杂CPU运算,使传感器节点、控制器等设备功耗降低50%-80%;成本优化:无需额外DSP或FPGA,利用MCU内置位算模块即...
2025-07-23 -
 新疆地平线开源导航控制器解决方案
新疆地平线开源导航控制器解决方案开源导航控制器在水下机器人勘探中的应用。 水下机器人导航的特殊挑战,关键难题:GPS失效:水下无法接收卫星信号;传感器限制:视觉在浑浊水域失效,声呐分辨率低;动力学复杂:洋流扰动+六自由度运动(横滚/俯仰/偏航)。关键技术创新,多传感器融合定位:紧耦合INS/...
2025-07-23 -
 重庆低功耗位算单元平台
重庆低功耗位算单元平台位算单元主要处理二进制位操作,如逻辑运算、移位、位掩码等,是计算机底层的关键模块。而人工智能,尤其是机器学习,通常涉及大量的数值计算,如矩阵乘法、卷积运算等,这些传统上由浮点运算单元(FPU)或加速器(如 GPU、TPU)处理。但近年来,随着深度学习的发展,低...
2025-07-23 -
 合肥全场景定位位算单元批发
合肥全场景定位位算单元批发系统程序员专注于操作系统、设备驱动程序以及底层软件的开发。在操作系统内核中,为了实现高效的内存管理、进程调度和中断处理,常常需要利用位算单元进行位级别的操作。例如,通过位运算来管理内存页表,标记内存的使用状态;在设备驱动程序开发里,对硬件寄存器进行精确控制,像...
2025-07-23 -
 无锡智能制造全源融合时空智能敏捷开发平台售后
无锡智能制造全源融合时空智能敏捷开发平台售后全源融合时空智能敏捷开发平台通过创新技术架构实现多源时空数据的深度融合与实时处理,其关键能力体现在以下方面:多源异构数据接入能力,实时数据处理技术,关键技术突破:动态时空基准统一技术、多模态数据融合算法、边缘-云端协同计算,典型应用场景:城市治理、应急响应、商...
2025-07-23 -
 四川边缘计算全源融合时空智能敏捷开发平台功能
四川边缘计算全源融合时空智能敏捷开发平台功能在全球倡导绿色低碳发展的背景下,全源融合时空智能敏捷开发平台将“低碳节能”理念深度融入技术架构与应用场景,通过轻量化算法设计、智能资源调度与绿色硬件适配,构建起高效低耗的“绿色时空计算”体系,为数字经济与生态保护的协同发展提供新范式。平台从算法层入手,研发轻量...
2025-07-23 -
 江苏英伟达全源融合时空智能敏捷开发平台作用
江苏英伟达全源融合时空智能敏捷开发平台作用在全源融合时空智能敏捷开发平台中,高精度定位技术如同精确的 “数字标尺”,实现对物理世界毫米级的时空把控,让每一个空间坐标都具备前所未有的精确性,为众多领域带来颠覆性变革。该平台融合北斗卫星导航系统、惯性导航技术与视觉定位算法,构建起多源融合的定位体系。北斗卫...
2025-07-23 -
 武汉工业级位算单元厂家
武汉工业级位算单元厂家位算单元是实时控制系统与物理世界交互的 “数字神经”,其性能直接决定了系统对动态环境的响应能力。在工业 4.0、自动驾驶等场景中,位算单元通过硬件级位操作优化,实现了从微秒级控制到纳秒级感知的跨越。未来,随着边缘计算、异构集成技术的发展,位算单元将更注重能效优...
2025-07-23 -
 重庆智能仓储全源融合时空智能敏捷开发平台咨询
重庆智能仓储全源融合时空智能敏捷开发平台咨询随着数字化转型的加速,时空数据正成为继土地、劳动力、资本之后的第四大生产要素。全源融合时空智能平台通过整合多源异构数据、智能分析与敏捷开发能力,正在颠覆传统时空数据服务的商业模式,推动从“数据交易”向“价值运营”的转变。全源融合时空智能平台通过“数据融合+智能...
2025-07-23 -
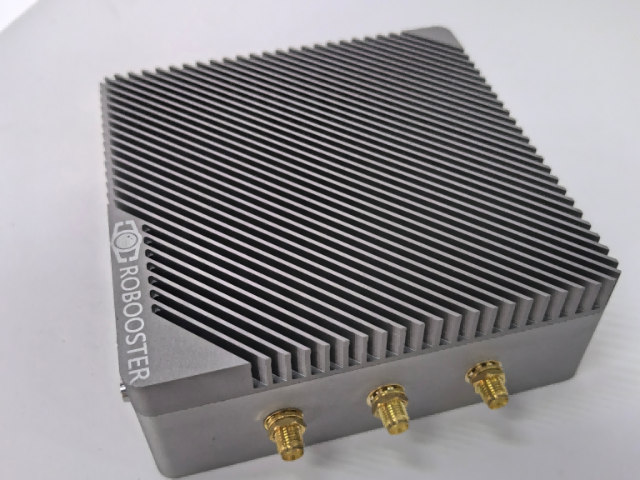
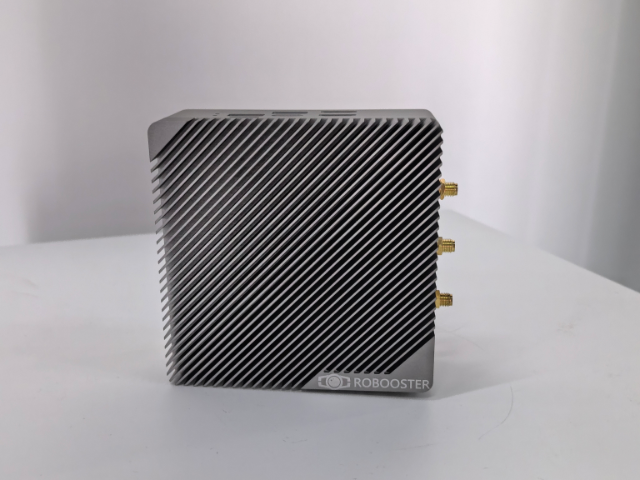 苏州感知定位位算单元二次开发
苏州感知定位位算单元二次开发“位算”取“位姿计算”之意,是robooster基于十余年的技术积累,结合上千个项目经验打造,是卫星定位与感知定位的完美融合,深度融合激光扫描仪/视觉传感器、IMU与RTKGNSS,真正解决了室内外泛移动机器人系统对于全场景定位的需求;包含有图模式和无图模式,...
2025-07-23 -
 浙江Linux开源导航控制器系统
浙江Linux开源导航控制器系统医疗手术机器人是 高精度、高安全性、实时响应 的典型应用场景,而 开源导航控制器(如ROS/ROS 2、MoveIt、3D视觉算法) 凭借 模块化、可定制、科研友好 的特点,成为手术机器人研发的关键技术支撑。以下是具体案例与技术方案。典型手术机器人类型:骨科手...
2025-07-23 -
长沙教学用全源融合时空智能敏捷开发平台售后
时空智能平台赋能应急管理:从响应到预防。在灾害应急领域,全源融合时空智能平台通过聚合地质传感器、无人机影像、社交媒体舆情等数据,实现灾情动态感知与智能研判。例如,地震发生后,平台可快速模拟受灾范围,结合实时路网数据规划合适的救援路径,并通过敏捷开发接口对接应急...
2025-07-23 -
 黑龙江智能制造开源导航控制器咨询
黑龙江智能制造开源导航控制器咨询在地震、塌方、火灾等灾害场景中,传统救援方式面临 环境复杂、通信中断、危险系数高等问题,而开源导航控制器(如ROS/ROS 2、SLAM算法、Autoware) 凭借 模块化、抗干扰、快速部署 的优势,成为搜救机器人的关键技术方案。典型灾害救援机器人:轮式/履...
2025-07-23 -
 天津高性能全源融合时空智能敏捷开发平台咨询
天津高性能全源融合时空智能敏捷开发平台咨询全源融合时空智能敏捷开发平台正站在技术变革的关键节点,随着 5G、量子计算、元宇宙等前沿技术的加速突破,其应用边界将被彻底重构,引导人类开启时空智能的全新时代。这场变革不仅关乎技术的迭代,更将重塑产业形态、社会治理与人类生活的底层逻辑。全源融合时空智能敏捷开发...
2025-07-22 -
四川高性能位算单元开发
在计算机的复杂架构中,位算单元犹如一颗精密的 “运算心脏”,默默驱动着各种数据处理任务。从简单的数值计算到复杂的加密算法,位算单元的身影无处不在,其高效、精确的运算能力为现代计算机技术的飞速发展奠定了坚实基础。位算单元,全称为位运算单元(Bitwise Ari...
2025-07-22 -
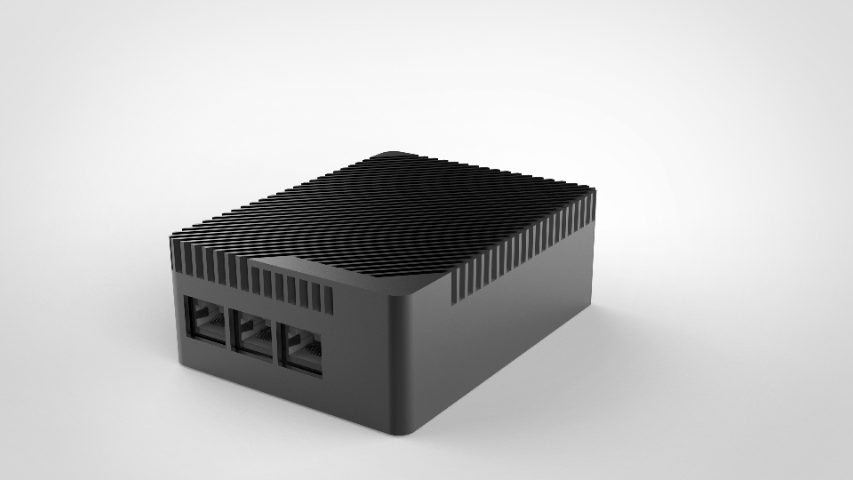
 无锡工业级开源导航控制器定制
无锡工业级开源导航控制器定制Robooster系列开源导航控制器,是robooster基于自身长期行业经验及认知,联合英伟达、地平线、联宝等合作伙伴,专为泛移动机器人系统研发的主控系统;内部集成各类导航传感器,采样频率均与1PPS同步,同时根据用户配置生成4路同步信号用来触发外部传感器;...
2025-07-22 -
 无锡低功耗全源融合时空智能敏捷开发平台售后
无锡低功耗全源融合时空智能敏捷开发平台售后全源融合时空智能敏捷开发平台通过创新技术架构实现多源时空数据的深度融合与实时处理,其关键能力体现在以下方面:多源异构数据接入能力,实时数据处理技术,关键技术突破:动态时空基准统一技术、多模态数据融合算法、边缘-云端协同计算,典型应用场景:城市治理、应急响应、商...
2025-07-22 -
 江苏测绘建模全源融合时空智能敏捷开发平台定制
江苏测绘建模全源融合时空智能敏捷开发平台定制全源融合时空智能敏捷开发平台正突破行业边界,开启跨领域融合的新纪元。这个具备时空感知、智能决策和敏捷响应能力的数字基座,正在重构人类社会的运行方式。数字孪生:构建虚实共生的平行世界,智能体协同:重塑社会运行范式,前沿科技融合创新,可持续发展赋能。技术挑战:解决...
2025-07-22 -
安徽高性能位算单元方案
位算单元的位运算可以高效实现特定场景下的模运算,尤其当除数是2的幂次方时,性能远超常规的运算符。以下是详细的实现方法和应用场景分析。基础原理,2的幂次方模运算:数学等价公式、代码实现。性能对比测试:测试代码、典型测试结果。高级应用场景: 循环缓冲区索引、哈希表...
2025-07-22 -
 南京智能制造全源融合时空智能敏捷开发平台系统
南京智能制造全源融合时空智能敏捷开发平台系统全源融合时空智能敏捷开发平台将高分辨率卫星遥感数据与土地利用现状数据深度融合,构建土地利用动态监测体系。卫星遥感影像以定期拍摄的方式获取地表信息,通过平台的智能图像识别算法,能够自动比对不同时期影像,识别土地利用类型的变化。在矿产资源领域,平台整合地质勘查数据...
2025-07-22 -
湖北智能制造位算单元批发
在科学计算与仿真领域,位运算虽通常位于底层,但对提升计算效率、优化数据结构、加速算法实现等方面具有关键作用。科学计算与仿真是指利用计算机技术、数学模型和算法,对复杂的科学问题、工程系统或自然现象进行数值模拟和分析的过程。它是继理论研究和实验研究之后,推动科学技...
2025-07-22 -
 上海边缘计算位算单元供应商
上海边缘计算位算单元供应商在现代CPU中,位算单元是算术逻辑单元(ALU)的重要组成部分,通常与加法器、乘法器等并行设计。由于其低延迟特性,位操作在底层编程(如嵌入式系统、驱动开发)中大量用于寄存器配置、标志位管理和数据压缩。在处理器设计中,位算单元通常由逻辑门(如NAND、NOR)组...
2025-07-22 -
工业级全源融合时空智能敏捷开发平台哪家好
在生态文明建设背景下,传统的环境监测手段已难以满足精细化治理需求。全源融合时空智能敏捷开发平台通过整合多源环境数据与智能分析技术,利用该平台融合空气质量监测站、排污企业数据、气象信息等,构建污染物扩散时空模型。构建起"空天地一体化"的生态保护新范式,为环境治理...
2025-07-22 -
 湖南机器视觉开源导航控制器系统
湖南机器视觉开源导航控制器系统极地科考(南极、北极、高山冰川)环境具有超级低温、强风、冰雪覆盖、GNSS信号不稳定等特点,传统探测方式风险高、效率低。而开源导航控制器(如ROS/ROS 2、PX4、SLAM算法) 凭借 模块化、抗极端环境、可远程操控的优势,成为极地无人探测车的关键技术方案...
2025-07-22 -
 长沙建图定位位算单元定制
长沙建图定位位算单元定制量子计算与经典位运算的协同是当前量子信息技术发展的主要范式之一,两者通过优势互补实现复杂问题的高效求解。这种协同不仅体现在硬件架构的深度耦合,更贯穿于算法设计、控制逻辑与数据处理的全链条。这种协同模式在当前 “噪声中等规模量子(NISQ)” 时代尤为关键 ——...
2025-07-22 -
四川边缘计算位算单元
系统程序员专注于操作系统、设备驱动程序以及底层软件的开发。在操作系统内核中,为了实现高效的内存管理、进程调度和中断处理,常常需要利用位算单元进行位级别的操作。例如,通过位运算来管理内存页表,标记内存的使用状态;在设备驱动程序开发里,对硬件寄存器进行精确控制,像...
2025-07-22 -
北京工业级全源融合时空智能敏捷开发平台咨询
全源融合时空智能敏捷开发平台的独特之处在于其强大的时空数据处理能力和高度的灵活性。它能够根据企业的实际需求,定制个性化的开发方案,帮助企业打造独具特色的产品和服务。同时,该平台还提供了丰富的API接口和SDK开发工具包,方便企业进行二次开发,实现更多创新应用。...
2025-07-22 -
内蒙古教学用全源融合时空智能敏捷开发平台厂家
企业对于高效、智能的开发工具需求日益迫切。全源融合时空智能敏捷开发平台,正是为满足这一需求而生。该平台不仅适用于软件开发人员,更是项目经理、数据分析师以及所有追求高效开发流程的专业人士的理想选择。全源融合时空智能敏捷开发平台,融合了先进的技术,使得开发过程更加...
2025-07-22 -
 南京边缘计算开源导航控制器哪家好
南京边缘计算开源导航控制器哪家好Robooster系列开源导航控制器,是robooster基于自身长期行业经验及认知,联合英伟达、地平线、联宝等合作伙伴,专为泛移动机器人系统研发的主控系统;内部集成各类导航传感器,采样频率均与1PPS同步,同时根据用户配置生成4路同步信号用来触发外部传感器;...
2025-07-22 -
广东高性能开源导航控制器
家用扫地机器人的路径规划是其智能化的关键,决定了清扫效率、覆盖率和避障能力。开源导航控制器结合SLAM(同步定位与建图)算法,使低成本硬件也能实现高效清扫。以下是关键技术解析,开源导航方案组成:SLAM建图、路径规划。典型清扫策略:全覆盖路径规划、重污染区域重...
2025-07-22